In short
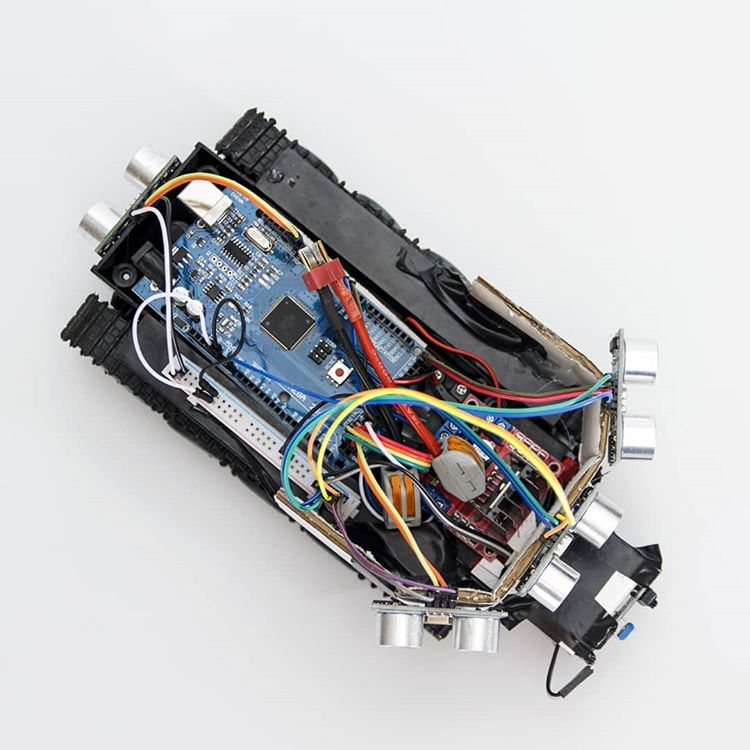
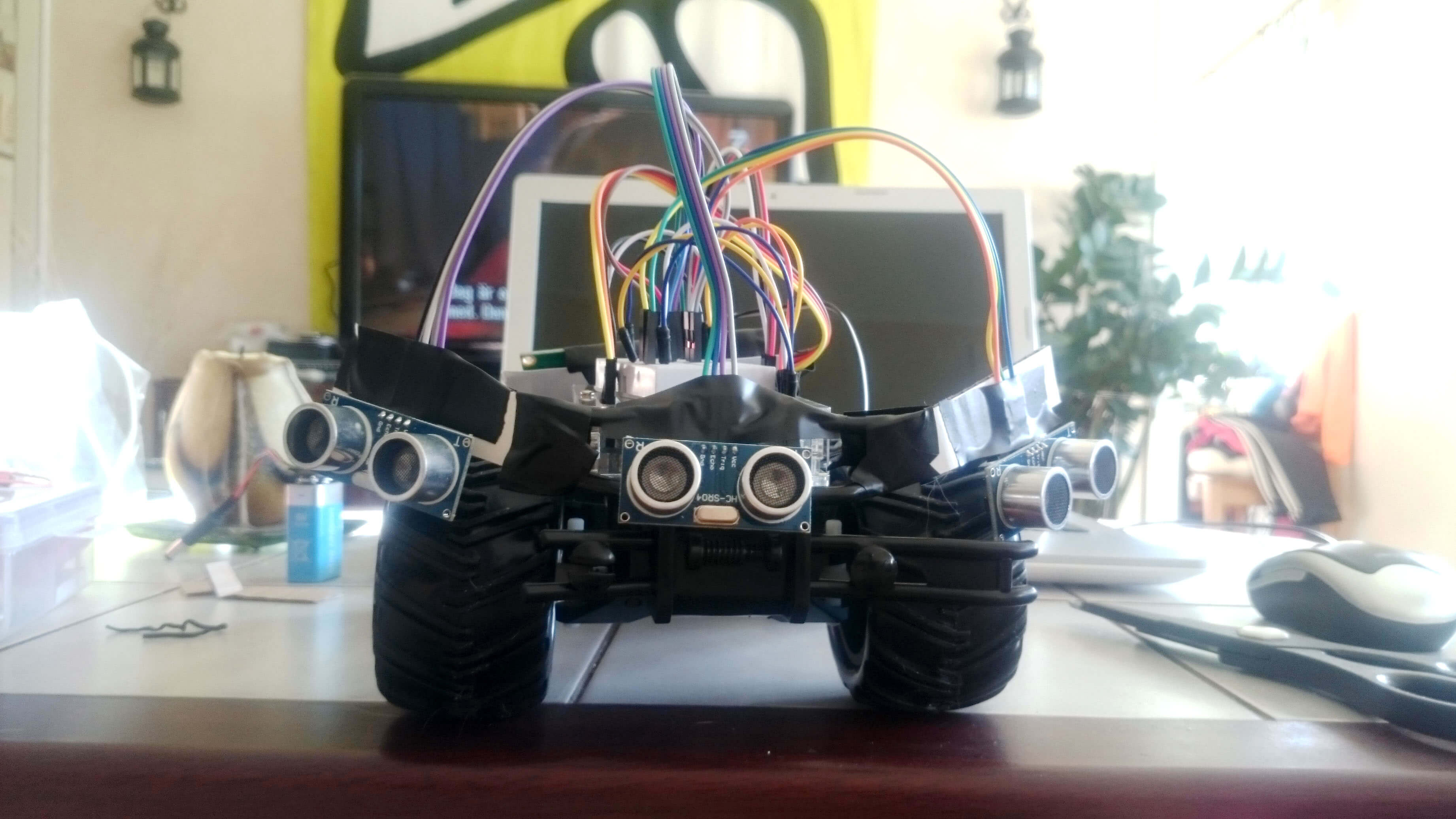
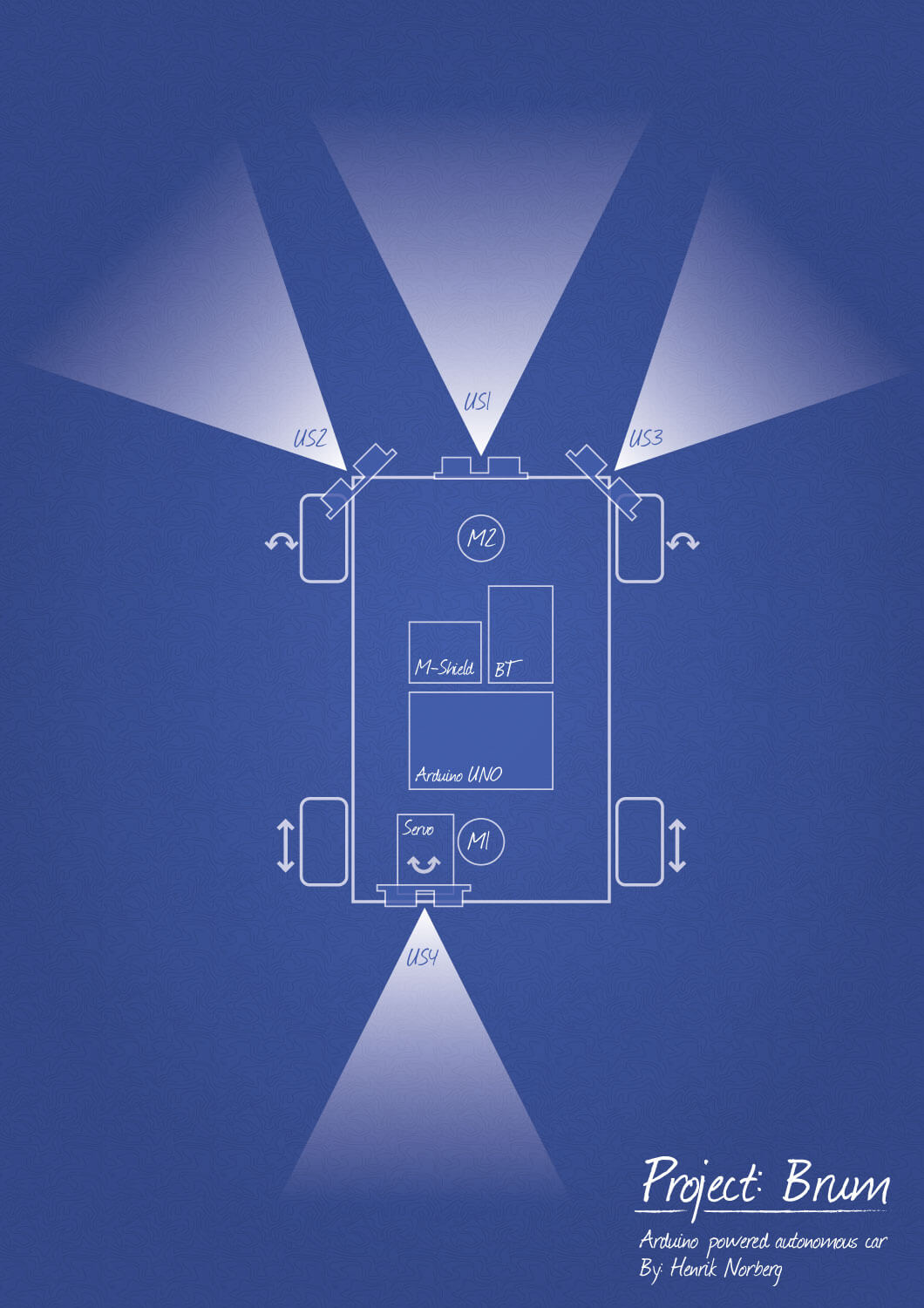
To much have been changed from the last post, but the major change is a new motor controller and a larger amount of sensors instead of one scanning one. The code has been tuned and it’s running much smoother now. Check out the videos, the first one is demonstrating the reversing and the second one the smoother and more precise driving.
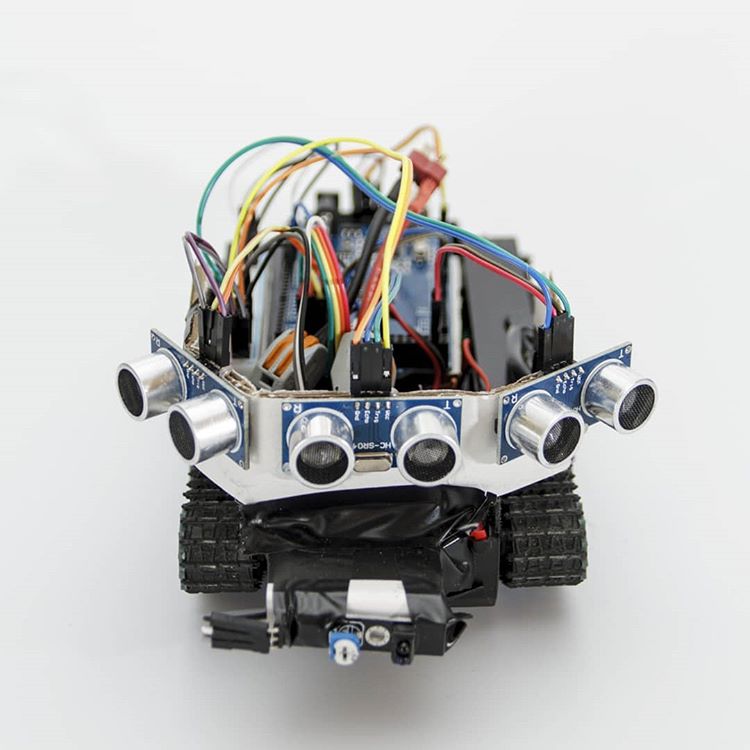
Update: Oh and missed the part of it beeing on a tank chassi now instead of a car. So 360º turning on the spot is a thing!
(Sorry for the vertical video on this one…)
The Code
No new code will be posted this time.
The Future
I have bought a new and much better battery setup for the car, much much more ompfh in the motors now! Been working on the code to improve the running but so far mostly made it worse.. I have bought a 3D-printer so will be making better mounting for all the parts and also a bumper for it to aid in collision detection. Stay tuned!